RPI4 Cross Compile for libcamera-app on Mac Pro (with docker) (4): Build libcamera-apps
Why am I doing this
After reading the camera app instructions, I thought of starting the development by modifying the libcamera-apps. Therefore, the first step is to build the original repo; after that, I can add my stuff to the official standard version.
It looks easy. The code-building instructions are well-documented on the official website, but there is a catch in my mind. I bought an expensive, neat, and tidy Macbook Pro after quitting my job as a mind-comforting geek gadget to compensate for losing my working life, so I don't want to build the code on a small RPI board. Instead, I want to build the code and develop things on my new laptop, which is why I got into this over tons of unexpected things just popping up in my sight…
Preface
- Create a docker container where I can cross-compile the libcamera-apps.
- Setup chroot
- Setup toolchain
- Build libcamera-apps <-
- The docker container should include the development environment I like.
- Setup vim
- Develop and debug for the self-built libcamera-apps
- My GitHub repository
Goals for building libcamera-apps
- Docker container for cross-compiling
- Cmake test
- Meson test
- Libcamera example
- Build libcamera-apps
Docker container for cross-compiling
First, let’s start a container by using the below command.
#!/bin/bash
_source=$SOURCE_CODE_DIR
_docker_source=/root/main
_test_source=$SOURCE_CODE_EXTRA_DATA_DIR
_docker_test_source=/root/test_data
_docker_image=aarch64-rpi4-bullseye-cross-compiler-2204:v0.1.3
_docker_volume=docker_build_rpi
_docker_volume_toolchain=rpi4-toolchain
_docker_volume_crosstool_ng=crosstoll_ng
docker run -it --rm \\\\
--privileged=true \\\\
--cap-add=SYS_ADMIN --security-opt apparmor:unconfined \\\\
-v $_docker_volume:/root/build \\\\
-v $_docker_volume_toolchain:/opt \\\\
-v $_docker_volume_crosstool_ng:/root/crosstool_ng \\\\
-v $_source:$_docker_source:delegated \\\\
-v $_test_source:$_docker_test_source:delegated \\\\
--net=host \\\\
$_docker_image bash
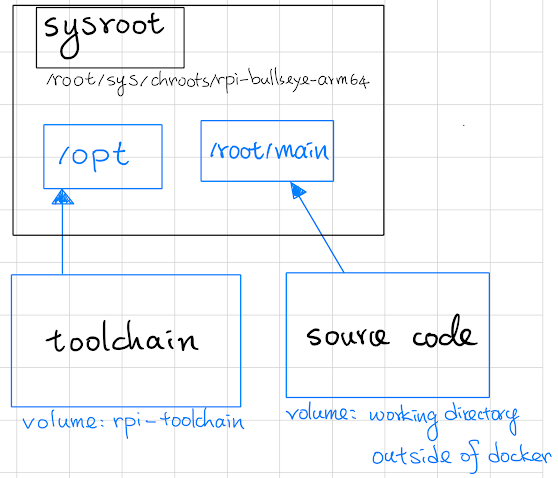
The below diagram shows the important components of the system configuration:
- sysroot: the location of our sysroot is in
/root/sys/chroots/rpi-bullseye-arm64where we can download packages we want by usingsbuild-apt rpi-$RELEASE-$ARCH apt-get install $packages-to-be-downloaded - toolchain: we have built and stored the toolchain in the volume:
rpi-toolchain, so we don’t rebuild the toolchain every time we start the container, and we can easily change the toolchain by binding the volumes stored by different toolchains to/opt - source code: binding a directory outside the docker container, and I can put the project that needs to be cross-compiled in this directory.
CMake test
After the container is well set, we can try a simple example, which is the same example in the post [Earthly, A. Bhattacharyea], where the code needs the libgmp to work properly and libgmp comes from the apt package, libgmp-dev, so if we can build and run the binary on the PRI4, then it proves that we can write codes that use the library from http://deb.debian.org/debian.
-
Follow the instructions in [Earthly, A. Bhattacharyea] from the section: “Writing the Program and Setting Up CMake,” but change the content of
aarch64-rpi4-linux-gnu.cmakeas the below lines.# <https://cmake.org/cmake/help/book/mastering-cmake/chapter/Cross%20Compiling%20With%20CMake.html> # Cross-compilation system information set(CMAKE_SYSTEM_NAME Linux) set(CMAKE_SYSTEM_PROCESSOR arm) # The sysroot contains all the libraries we might need to link against and # possibly headers we need for compilation set(CMAKE_SYSROOT /root/sys/chroots/rpi-bullseye-arm64/) set(CMAKE_FIND_ROOT_PATH ${CMAKE_SYSROOT}) set(CMAKE_LIBRARY_ARCHITECTURE aarch64-linux-gnu) set(CMAKE_STAGING_PREFIX $ENV{HOME}/RPi-dev/staging-armv8-rpi4) # Set the compilers for C, C++ and Fortran set(RPI_GCC_TRIPLE "aarch64-rpi4-linux-gnu") set(CMAKE_C_COMPILER ${RPI_GCC_TRIPLE}-gcc CACHE FILEPATH "C compiler") set(CMAKE_CXX_COMPILER ${RPI_GCC_TRIPLE}-g++ CACHE FILEPATH "C++ compiler") # Don't look for programs in the sysroot (these are ARM programs, they won't run # on the build machine) set(CMAKE_FIND_ROOT_PATH_MODE_PROGRAM NEVER) # Only look for libraries, headers and packages in the sysroot, don't look on # the build machine set(CMAKE_FIND_ROOT_PATH_MODE_LIBRARY ONLY) set(CMAKE_FIND_ROOT_PATH_MODE_INCLUDE ONLY) set(CMAKE_FIND_ROOT_PATH_MODE_PACKAGE ONLY) set(CPACK_DEBIAN_PACKAGE_ARCHITECTURE arm64) -
Install
libgmp-devsbuild-apt rpi-$RELEASE-$ARCH apt-get install libgmp-dev -
Cross-compile
- Note:
TC=aarch64-rpi4-linux-gnu
cmake -S . -B build -DCMAKE_TOOLCHAIN_FILE=cmake/$TC.cmake cmake --build build -j cmake --install build- The installed binary is
$ENV{HOME}/RPi-dev/staging-armv8-rpi4/bin/fact
- Note:
-
Test the binary
- copy
factinto RPI4 and run, and the output is identical to the output in [Earthly, A. Bhattacharyea] , which means we successfully cross-compiled a binary usingcmake.
pi@raspberrypi:~ $ ./fact-cross-demo-1025 The factorial of 1000 = 402387260077093773543702433923003985719374864210714632543799910429938512398629020592044208486969404800479988610197196058631666872994808558901323829669944590997424504087073759918823627727188732519779505950995276120874975462497043601418278094646496291056393887437886487337119181045825783647849977012476632889835955735432513185323958463075557409114262417474349347553428646576611667797396668820291207379143853719588249808126867838374559731746136085379534524221586593201928090878297308431392844403281231558611036976801357304216168747609675871348312025478589320767169132448426236131412508780208000261683151027341827977704784635868170164365024153691398281264810213092761244896359928705114964975419909342221566832572080821333186116811553615836546984046708975602900950537616475847728421889679646244945160765353408198901385442487984959953319101723355556602139450399736280750137837615307127761926849034352625200015888535147331611702103968175921510907788019393178114194545257223865541461062892187960223838971476088506276862967146674697562911234082439208160153780889893964518263243671616762179168909779911903754031274622289988005195444414282012187361745992642956581746628302955570299024324153181617210465832036786906117260158783520751516284225540265170483304226143974286933061690897968482590125458327168226458066526769958652682272807075781391858178889652208164348344825993266043367660176999612831860788386150279465955131156552036093988180612138558600301435694527224206344631797460594682573103790084024432438465657245014402821885252470935190620929023136493273497565513958720559654228749774011413346962715422845862377387538230483865688976461927383814900140767310446640259899490222221765904339901886018566526485061799702356193897017860040811889729918311021171229845901641921068884387121855646124960798722908519296819372388642614839657382291123125024186649353143970137428531926649875337218940694281434118520158014123344828015051399694290153483077644569099073152433278288269864602789864321139083506217095002597389863554277196742822248757586765752344220207573630569498825087968928162753848863396909959826280956121450994871701244516461260379029309120889086942028510640182154399457156805941872748998094254742173582401063677404595741785160829230135358081840096996372524230560855903700624271243416909004153690105933983835777939410970027753472000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000 - copy
Meson test
Before I saw the meson script in libcamera-app project, I haven’t heard of meson so I need a simple test before building libcamera-apps to adjust the config and prove I can cross-compile by meson. Therefore, I looked into the projects using the meson page and chose the first project 2048.cpp as the simple example.
To cross-compile in meson, I needed to write a “cross file” and set the file as one of the setup arguments. The cross-file-related documents are [meson cross compilation] and [meson cross and native file reference]. They helped me to write my own file as the below example:
-
rpi_cross_file.txt
[constants] toolchain_dir = '/opt/x-tools/aarch64-rpi4-linux-gnu/bin/' target_setting = 'aarch64-rpi4-linux-gnu' c_sys_root = '/root/sys/chroots/rpi-bullseye-arm64/' [binaries] c = toolchain_dir / target_setting + '-gcc' cpp = toolchain_dir / target_setting + '-g++' strip = toolchain_dir / target_setting + 'strip' pkg-config = '/usr/bin/pkg-config' [properties] sys_root = c_sys_root pkg_config_libdir = sys_root + 'usr/lib/aarch64-linux-gnu/pkgconfig' [host_machine] system = 'Linux' cpu_family = 'aarch64' cpu = 'aarch64' endian = 'little' -
Build 2048.cpp
git clone <https://github.com/plibither8/2048.cpp.git> cd 2048.cpp meson setup --cross-file rpi_cross_file.txt build meson compile -C build meson configure build --prefix=$(pwd)/installed_bin meson install -C build -
Test on RPI
- copy
2048.cpp/installed_bin/bin/2048to RPI4 and run- It worked, too.
/\\\\\\\\\\\\\\\\\\ /\\\\\\\\\\\\\\ /\\\\\\ /\\\\\\\\\\\\\\\\\\ /\\\\\\///////\\\\\\ /\\\\\\/////\\\\\\ /\\\\\\\\\\ /\\\\\\///////\\\\\\ \\/// \\//\\\\\\ /\\\\\\ \\//\\\\\\ /\\\\\\/\\\\\\ \\/\\\\\\ \\/\\\\\\ /\\\\\\/ \\/\\\\\\ \\/\\\\\\ /\\\\\\/\\/\\\\\\ \\///\\\\\\\\\\\\\\\\\\/ /\\\\\\// \\/\\\\\\ \\/\\\\\\ /\\\\\\/ \\/\\\\\\ /\\\\\\///////\\\\\\ /\\\\\\// \\/\\\\\\ \\/\\\\\\ /\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\ /\\\\\\ \\//\\\\\\ /\\\\\\/ \\//\\\\\\ /\\\\\\ \\///////////\\\\\\// \\//\\\\\\ /\\\\\\ /\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\ \\///\\\\\\\\\\\\\\/ \\/\\\\\\ \\///\\\\\\\\\\\\\\\\\\/ \\/////////////// \\/////// \\/// \\///////// ┌───────────────────────────┐ │ SCORE: 0 │ │ BEST SCORE: 0 │ │ MOVES: 1 │ └───────────────────────────┘ ┌──────┬──────┬──────┬──────┐ │ │ │ │ │ ├──────┼──────┼──────┼──────┤ │ │ │ │ 2 │ ├──────┼──────┼──────┼──────┤ │ │ 2 │ │ │ ├──────┼──────┼──────┼──────┤ │ │ │ │ 2 │ └──────┴──────┴──────┴──────┘ W or K or ↑ => Up A or H or ← => Left S or J or ↓ => Down D or L or → => Right Z or P => Save Press the keys to start and continue. - copy
Libcamera example
And next, I want to test building the code from [libcamera/simple-cam.git], which is the official example of the libcamera usage, so if it worked, we probably have little problem to our final goal: cross-compiling libcamera-app
-
Download the required packages
sbuild-apt rpi-$RELEASE-$ARCH apt-get update sbuild-apt rpi-$RELEASE-$ARCH apt-get install libcamera-dev sbuild-apt rpi-$RELEASE-$ARCH apt-get install libevent-dev -
Download simple-cam
git clone https://git.libcamera.org/libcamera/simple-cam.git -
Meson build setup
cd simple-cam meson setup --cross-file rpi_cross_file.txt build- And, failed.
meson.build:16:0: ERROR: Pkg-config binary for machine 1 not found. Giving up.- I found that the
meson --versonIn my container is0.61.2, and it seems to have issues when using pkg-config, so I downloaded the latest meson on GitHub and used it by:
git clone <https://github.com/mesonbuild/meson.git> cd simple-cam ../meson/meson.py setup --wipe --cross-file rpi_cross_file.txt build ../meson/meson.py compile -C build- And, failed again…
/opt/x-tools/aarch64-rpi4-linux-gnu/bin/aarch64-rpi4-linux-gnu-g++ -Isimple-cam.p -I. -I.. -I/root/sys/chroots/rpi-bullseye-arm64//usr/include/libcamera -fdiagnostics-color=always -D_FILE_OFFSET_BITS=64 -Wall -Winvalid-pch -Wextra -Werror -std=c++17 -O0 -g -Wno-unused-parameter -pthread -MD -MQ simple-cam.p/event_loop.cpp.o -MF simple-cam.p/event_loop.cpp.o.d -o simple-cam.p/event_loop.cpp.o -c ../event_loop.cpp ../event_loop.cpp:11:10: fatal error: event2/event.h: No such file or directory 11 | #include <event2/event.h> | ^~~~~~~~~~~~~~~~- So, I add
cpp_argsinrpi_cross_file.txts.
[constants] toolchain_dir = '/opt/x-tools/aarch64-rpi4-linux-gnu/bin/' target_setting = 'aarch64-rpi4-linux-gnu' c_sys_root = '/root/sys/chroots/rpi-bullseye-arm64/' [binaries] c = toolchain_dir / target_setting + '-gcc' cpp = toolchain_dir / target_setting + '-g++' strip = toolchain_dir / target_setting + 'strip' pkg-config = '/usr/bin/pkg-config' [properties] sys_root = c_sys_root pkg_config_libdir = sys_root + 'usr/lib/aarch64-linux-gnu/pkgconfig' [built-in options] cpp_args = ['-I' + c_sys_root + 'usr/include/','-I' + c_sys_root + 'usr/include/aarch64-linux-gnu/'] [host_machine] system = 'Linux' cpu_family = 'aarch64' cpu = 'aarch64' endian = 'little'- And it passed the including part but failed at the linking stage, so the
cpp_link_argsshould be specified, too
/opt/x-tools/aarch64-rpi4-linux-gnu/bin/aarch64-rpi4-linux-gnu-g++ -o simple-cam simple-cam.p/simple-cam.cpp.o simple-cam.p/event_loop.cpp.o -Wl,--as-needed -Wl,--no-undefined -Wl,-rpath,/root/sys/chroots/rpi-bullseye-arm64/usr/lib/aarch64-linux-gnu -Wl,-rpath-link,/root/sys/chroots/rpi-bullseye-arm64/usr/lib/aarch64-linux-gnu -Wl,--start-group /root/sys/chroots/rpi-bullseye-arm64/usr/lib/aarch64-linux-gnu/libcamera.so /root/sys/chroots/rpi-bullseye-arm64/usr/lib/aarch64-linux-gnu/libcamera-base.so /root/sys/chroots/rpi-bullseye-arm64/usr/lib/aarch64-linux-gnu/libevent_pthreads.so /root/sys/chroots/rpi-bullseye-arm64/usr/lib/aarch64-linux-gnu/libevent.so -Wl,--end-group -pthread /opt/x-tools/aarch64-rpi4-linux-gnu/bin/../lib/gcc/aarch64-rpi4-linux-gnu/10.5.0/../../../../aarch64-rpi4-linux-gnu/bin/ld: warning: libz.so.1, needed by /root/sys/chroots/rpi-bullseye-arm64/usr/lib/aarch64-linux-gnu/libdw.so.1, not found (try using -rpath or -rpath-link) /opt/x-tools/aarch64-rpi4-linux-gnu/bin/../lib/gcc/aarch64-rpi4-linux-gnu/10.5.0/../../../../aarch64-rpi4-linux-gnu/bin/ld: warning: liblzma.so.5, needed by /root/sys/chroots/rpi-bullseye-arm64/usr/lib/aarch64-linux-gnu/libdw.so.1, not found (try using -rpath or -rpath-link) /opt/x-tools/aarch64-rpi4-linux-gnu/bin/../lib/gcc/aarch64-rpi4-linux-gnu/10.5.0/../../../../aarch64-rpi4-linux-gnu/bin/ld: warning: libbz2.so.1.0, needed by /root/sys/chroots/rpi-bullseye-arm64/usr/lib/aarch64-linux-gnu/libdw.so.1, not found (try using -rpath or -rpath-link) ... reference to `lzma_index_uncompressed_size@XZ_5.0' collect2: error: ld returned 1 exit status ninja: build stopped: subcommand failed.- Specify the
cpp_link_args- Note: the added location is found by
findcommand for the missed libraries.
- Note: the added location is found by
[constants] toolchain_dir = '/opt/x-tools/aarch64-rpi4-linux-gnu/bin/' target_setting = 'aarch64-rpi4-linux-gnu' c_sys_root = '/root/sys/chroots/rpi-bullseye-arm64/' [binaries] c = toolchain_dir / target_setting + '-gcc' cpp = toolchain_dir / target_setting + '-g++' strip = toolchain_dir / target_setting + 'strip' pkg-config = '/usr/bin/pkg-config' [properties] sys_root = c_sys_root pkg_config_libdir = sys_root + 'usr/lib/aarch64-linux-gnu/pkgconfig' [built-in options] cpp_args = ['-I' + c_sys_root + 'usr/include/','-I' + c_sys_root + 'usr/include/aarch64-linux-gnu/'] cpp_link_args = ['-Wl,-rpath,' + c_sys_root + 'lib/aarch64-linux-gnu/', '-Wl,-rpath-link,' + c_sys_root + 'lib/aarch64-linux-gnu/'] [host_machine] system = 'Linux' cpu_family = 'aarch64' cpu = 'aarch64' endian = 'little' -
Test the binary on RPI4 board, and it is workable.
pi@raspberrypi:~ $ ./simple-pi-cross-test-1025 [4:04:07.691820562] [2377] INFO Camera camera_manager.cpp:297 libcamera v0.0.5+83-bde9b04f [4:04:07.756722838] [2378] WARN RPI vc4.cpp:383 Mismatch between Unicam and CamHelper for embedded data usage! [4:04:07.757532325] [2378] INFO RPI vc4.cpp:437 Registered camera /base/soc/i2c0mux/i2c@1/imx219@10 to Unicam device /dev/media4 and ISP device /dev/media0 - 'imx219' (/base/soc/i2c0mux/i2c@1/imx219@10) Default viewfinder configuration is: 800x600-NV12 Validated viewfinder configuration is: 800x600-NV12 [4:04:07.758383719] [2377] INFO Camera camera.cpp:1033 configuring streams: (0) 800x600-NV12 [4:04:07.758904193] [2378] INFO RPI vc4.cpp:565 Sensor: /base/soc/i2c0mux/i2c@1/imx219@10 - Selected sensor format: 1640x1232-SBGGR10_1X10 - Selected unicam format: 1640x1232-pBAA Allocated 4 buffers for stream Request completed: Request(0:C:0/1:0) Brightness = 0.500000 ExposureTime = 29999 FocusFoM = 385 AnalogueGain = 2.151261 ColourCorrectionMatrix = [ 1.707466, -0.635721, -0.071751, -0.407837, 2.002241, -0.594406, -0.086645, -0.653424, 1.740068 ] FrameDuration = 33326 Lux = 377.171906 AeLocked = false ColourGains = [ 1.771746, 1.573529 ] DigitalGain = 1.000000 ColourTemperature = 4809 SensorBlackLevels = [ 4096, 4096, 4096, 4096 ] ScalerCrop = (0, 2)/3280x2460 SensorTimestamp = 14648048007000 seq: 000007 timestamp: 14648048007000 bytesused: 480000/240000
Build libcamera-apps
Finally, let’s see how to manage libcamera-apps, so we quickly download the source, install the required packages and build with the previous workable cross-file.
- Note: the build flags follow the setting from rpi camera official page
sbuild-apt rpi-$RELEASE-$ARCH apt-get install libpng-dev libcamera-dev libjpeg-dev libtiff5-dev libboost-all-dev libdrm-dev libexif-dev
git clone <https://github.com/raspberrypi/libcamera-apps.git>
cd libcamera-apps
ln -s ../rpi_cross_file.txt
../meson/meson.py setup --wipe build -Denable_libav=true -Denable_drm=true -Denable_egl=true -Denable_qt=true -Denable_opencv=false -Denable_tflite=false --cross-file rpi_cross_file.txt
../meson/meson.py compile -C build
The first try results in the below failed message:
[2/39] Compiling C++ object libcamera_app.so.1.2.1.p/core_post_processor.cpp.o
FAILED: libcamera_app.so.1.2.1.p/core_post_processor.cpp.o
/opt/x-tools/aarch64-rpi4-linux-gnu/bin/aarch64-rpi4-linux-gnu-g++ -Ilibcamera_app.so.1.2.1.p -I. -I.. -Icore -I/root/sys/chroots/rpi-bullseye-arm64//usr/include/libcamera -I/usr/include -I/root/sys/chroots/rpi-bullseye-arm64//usr/include/aarch64-linux-gnu -I/root/sys/chroots/rpi-bullseye-arm64//usr/include/libpng16 -I/root/sys/chroots/rpi-bullseye-arm64//usr/include/libdrm -I/root/sys/chroots/rpi-bullseye-arm64/usr/include/ -I/root/sys/chroots/rpi-bullseye-arm64/usr/include/aarch64-linux-gnu/ -fdiagnostics-color=always -Wall -Winvalid-pch -Wextra -Wpedantic -Werror -std=c++17 -O3 -pedantic -Wno-unused-parameter -faligned-new -D_FILE_OFFSET_BITS=64 -Wno-psabi -ftree-vectorize -DLIBDRM_PRESENT=1 -Wno-variadic-macros -Wno-pedantic -fPIC -pthread -DBOOST_ALL_NO_LIB -MD -MQ libcamera_app.so.1.2.1.p/core_post_processor.cpp.o -MF libcamera_app.so.1.2.1.p/core_post_processor.cpp.o.d -o libcamera_app.so.1.2.1.p/core_post_processor.cpp.o -c ../core/post_processor.cpp
In file included from /opt/x-tools/aarch64-rpi4-linux-gnu/aarch64-rpi4-linux-gnu/include/c++/10.5.0/aarch64-rpi4-linux-gnu/bits/gthr-default.h:48,
from /opt/x-tools/aarch64-rpi4-linux-gnu/aarch64-rpi4-linux-gnu/include/c++/10.5.0/aarch64-rpi4-linux-gnu/bits/gthr.h:151,
from /opt/x-tools/aarch64-rpi4-linux-gnu/aarch64-rpi4-linux-gnu/include/c++/10.5.0/ext/atomicity.h:35,
from /opt/x-tools/aarch64-rpi4-linux-gnu/aarch64-rpi4-linux-gnu/include/c++/10.5.0/bits/ios_base.h:39,
from /opt/x-tools/aarch64-rpi4-linux-gnu/aarch64-rpi4-linux-gnu/include/c++/10.5.0/ios:42,
from /opt/x-tools/aarch64-rpi4-linux-gnu/aarch64-rpi4-linux-gnu/include/c++/10.5.0/ostream:38,
from /opt/x-tools/aarch64-rpi4-linux-gnu/aarch64-rpi4-linux-gnu/include/c++/10.5.0/iostream:39,
from ../core/post_processor.cpp:8:
/usr/include/pthread.h:31:10: fatal error: bits/types/struct___jmp_buf_tag.h: No such file or directory
31 | #include <bits/types/struct___jmp_buf_tag.h>
| ^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
compilation terminated.
I found -I/usr/include in the build command, so I suspected that g++ includes the file from the Ubuntu container instead of from the sysroot. Therefore, I looked into the setup message and realized that meson used the boost from /usr instead of sysroot + /usr, which caused the compilation failure.
The Meson build system
Version: 1.2.99
Source dir: /root/main/libcamera-apps
Build dir: /root/main/libcamera-apps/build
Build type: cross build
Project name: libcamera-apps
Project version: 1.2.1
C compiler for the host machine: /opt/x-tools/aarch64-rpi4-linux-gnu/bin/aarch64-rpi4-linux-gnu-gcc (gcc 10.5.0 "aarch64-rpi4-linux-gnu-gcc (crosstool-NG 1.26.0_rc1) 10.5.0")
C linker for the host machine: /opt/x-tools/aarch64-rpi4-linux-gnu/bin/aarch64-rpi4-linux-gnu-gcc ld.bfd 1.26.0
C++ compiler for the host machine: /opt/x-tools/aarch64-rpi4-linux-gnu/bin/aarch64-rpi4-linux-gnu-g++ (gcc 10.5.0 "aarch64-rpi4-linux-gnu-g++ (crosstool-NG 1.26.0_rc1) 10.5.0")
C++ linker for the host machine: /opt/x-tools/aarch64-rpi4-linux-gnu/bin/aarch64-rpi4-linux-gnu-g++ ld.bfd 1.26.0
C compiler for the build machine: cc (gcc 11.4.0 "cc (Ubuntu 11.4.0-1ubuntu1~22.04) 11.4.0")
C linker for the build machine: cc ld.bfd 2.38
C++ compiler for the build machine: c++ (gcc 11.4.0 "c++ (Ubuntu 11.4.0-1ubuntu1~22.04) 11.4.0")
C++ linker for the build machine: c++ ld.bfd 2.38
Build machine cpu family: aarch64
Build machine cpu: aarch64
Host machine cpu family: aarch64
Host machine cpu: aarch64
Target machine cpu family: aarch64
Target machine cpu: aarch64
Found pkg-config: YES (/usr/bin/pkg-config) 0.29.2
Run-time dependency libcamera found: YES 0.0.5
Run-time dependency Boost (found: program_options) found: YES 1.74.0 (/usr) <----- this line
Run-time dependency threads found: YES
Found CMake: NO
Run-time dependency libavcodec found: NO (tried pkgconfig and cmake)
Run-time dependency libexif found: YES 0.6.22
Run-time dependency libjpeg found: YES 2.0.6
Run-time dependency libtiff-4 found: YES 4.2.0
Run-time dependency libpng found: YES 1.6.37
Run-time dependency libdrm found: YES 2.4.104
Run-time dependency x11 found: NO (tried pkgconfig and cmake)
Run-time dependency epoxy found: NO (tried pkgconfig and cmake)
qmake5 found: NO need ['>= 5', '< 6']
Run-time dependency qt5 (modules: Core, Widgets) found: NO (tried pkgconfig and config-tool)
Run-time dependency opencv4 found: NO (tried pkgconfig and cmake)
Run-time dependency tensorflow-lite found: NO (tried pkgconfig and cmake)
Build targets in project: 7
libcamera-apps 1.2.1
libcamera
location : /usr/lib/aarch64-linux-gnu
version : 0.0.5
Build configuration
libav encoder : NO
drm preview : YES
egl preview : NO
qt preview : NO
OpenCV postprocessing: NO
TFLite postprocessing: NO
User defined options
Cross files : rpi_cross_file.txt
prefix : /root/main/libcamera-apps/installed_bin
enable_drm : true
enable_egl : true
enable_libav : true
enable_opencv : false
enable_qt : true
enable_tflite : false
Found ninja-1.10.1 at /usr/bin/ninja
To resolve this issue, I added a proper boost.pc in the sysroot to specify the prefix of the boost libraries to /root/sys/chroots/rpi-bullseye-arm64/usr
cd /root/sys/chroots/rpi-bullseye-arm64/usr/lib/aarch64-linux-gnu/pkgconfig
cat > boost.pc <<EOF
# Package Information for pkg-config
prefix=/root/sys/chroots/rpi-bullseye-arm64/usr
exec_prefix=${prefix}
libdir=${exec_prefix}/lib
includedir_old=${prefix}/include/boost
includedir_new=${prefix}/include
Name: Boost
Description: Boost is awesome
Version: 1.74.0
Libs: -L${exec_prefix}/lib -lboost_prg_exec_monitor-mt
-lboost_math_c99f-mt -lboost_unit_test_framework-mt
-lboost_container-mt -lboost_log_setup -lboost_math_tr1l
-lboost_graph-mt -lboost_wserialization-mt -lboost_log-mt
-lboost_math_c99f -lboost_type_erasure -lboost_signals-mt
-lboost_test_exec_monitor -lboost_filesystem -lboost_thread-mt
-lboost_math_tr1f-mt -lboost_date_time -lboost_timer
-lboost_math_tr1f -lboost_test_exec_monitor-mt -lboost_container
-lboost_math_tr1 -lboost_type_erasure-mt
-lboost_program_options-mt -lboost_graph -lboost_log_setup-mt
-lboost_random -lboost_system -lboost_system-mt -lboost_locale-mt
-lboost_wserialization -lboost_regex -lboost_exception
-lboost_timer-mt -lboost_signals -lboost_filesystem-mt
-lboost_math_c99-mt -lboost_math_tr1-mt -lboost_serialization-mt
-lboost_serialization -lboost_prg_exec_monitor -lboost_exception-mt
-lboost_coroutine -lboost_math_c99 -lboost_iostreams-mt
-lboost_random-mt -lboost_program_options -lboost_atomic-mt
-lboost_date_time-mt -lboost_math_c99l -lboost_math_tr1l-mt
-lboost_context-mt -lboost_regex-mt -lboost_coroutine-mt
-lboost_log -lboost_chrono-mt -lboost_wave-mt
-lboost_iostreams -lboost_chrono -lboost_unit_test_framework
-lboost_math_c99l-mt
Cflags: -I\\${includedir_old} -I\\${includedir_new}
EOF
Add --wipe to set up the build again and compile, and the "include errors" were gone.
../meson/meson.py setup --wipe build -Denable_libav=true -Denable_drm=true -Denable_egl=true -Denable_qt=true -Denable_opencv=false -Denable_tflite=false --cross-file rpi_cross_file.txt
../meson/meson.py compile -C build
FAILED: libcamera_app.so.1.2.1.p/encoder_encoder.cpp.o
/opt/x-tools/aarch64-rpi4-linux-gnu/bin/aarch64-rpi4-linux-gnu-g++ -Ilibcamera_app.so.1.2.1.p -I. -I.. -Icore -I/root/sys/chroots/rpi-bullseye-arm64//usr/include/libcamera -I/root/sys/chroots/rpi-bullseye-arm64/usr/include -I/root/sys/chroots/rpi-bullseye-arm64//usr/include/aarch64-linux-gnu -I/root/sys/chroots/rpi-bullseye-arm64//usr/include/libpng16 -I/root/sys/chroots/rpi-bullseye-arm64//usr/include/libdrm -I/root/sys/chroots/rpi-bullseye-arm64/usr/include/ -I/root/sys/chroots/rpi-bullseye-arm64/usr/include/aarch64-linux-gnu/ -fdiagnostics-color=always -Wall -Winvalid-pch -Wextra -Wpedantic -Werror -std=c++17 -O3 -pedantic -Wno-unused-parameter -faligned-new -D_FILE_OFFSET_BITS=64 -Wno-psabi -ftree-vectorize -DLIBDRM_PRESENT=1 -fPIC -pthread -DBOOST_ALL_NO_LIB -MD -MQ libcamera_app.so.1.2.1.p/encoder_encoder.cpp.o -MF libcamera_app.so.1.2.1.p/encoder_encoder.cpp.o.d -o libcamera_app.so.1.2.1.p/encoder_encoder.cpp.o -c ../encoder/encoder.cpp
In file included from /root/sys/chroots/rpi-bullseye-arm64/usr/include/linux/posix_types.h:5,
from /root/sys/chroots/rpi-bullseye-arm64/usr/include/linux/types.h:9,
from /root/sys/chroots/rpi-bullseye-arm64/usr/include/linux/stat.h:5,
from /root/sys/chroots/rpi-bullseye-arm64//usr/include/aarch64-linux-gnu/bits/statx.h:31,
from /root/sys/chroots/rpi-bullseye-arm64//usr/include/aarch64-linux-gnu/sys/stat.h:446,
from ../encoder/encoder.cpp:11:
/root/sys/chroots/rpi-bullseye-arm64/usr/include/linux/stddef.h:26:49: error: ISO C++ does not permit named variadic macros **[-Werror=variadic-macros]**
26 | #define __struct_group(TAG, NAME, ATTRS, MEMBERS...) \\
| ^~~
In file included from /root/sys/chroots/rpi-bullseye-arm64//usr/include/aarch64-linux-gnu/bits/fcntl.h:61,
from /root/sys/chroots/rpi-bullseye-arm64/usr/include/fcntl.h:35,
from ../encoder/encoder.cpp:9:
/root/sys/chroots/rpi-bullseye-arm64//usr/include/aarch64-linux-gnu/bits/fcntl-linux.h:362:26: error: ISO C++ forbids zero-size array 'f_handle' **[-Werror=pedantic]**
362 | unsigned char f_handle[0];
|
But the following warning: I cannot find a proper way to navigate them, [-Werror=variadic-macros] and [-Werror=pedantic]. All can do is suppress the warning by adding -Wno-variadic-macros and -Wno-pedantic to cpp_args in rpi_cross_file.txt as a temporary workaround, and after that, all compilation finished successfully.
(rpi_cross_file.txt)[constants]
toolchain_dir = '/opt/x-tools/aarch64-rpi4-linux-gnu/bin/'
target_setting = 'aarch64-rpi4-linux-gnu'
c_sys_root = '/root/sys/chroots/rpi-bullseye-arm64/'
[binaries]
c = toolchain_dir / target_setting + '-gcc'
cpp = toolchain_dir / target_setting + '-g++'
strip = toolchain_dir / target_setting + 'strip'
pkg-config = '/usr/bin/pkg-config'
[properties]
sys_root = c_sys_root
pkg_config_libdir = sys_root + 'usr/lib/aarch64-linux-gnu/pkgconfig'
[built-in options]
cpp_args = ['-I' + c_sys_root + 'usr/include/','-I' + c_sys_root + 'usr/include/aarch64-linux-gnu/', '-Wno-variadic-macros', '-Wno-pedantic']
cpp_link_args = ['-Wl,-rpath,' + c_sys_root + 'lib/aarch64-linux-gnu/', '-Wl,-rpath-link,' + c_sys_root + 'lib/aarch64-linux-gnu/']
[host_machine]
system = 'Linux'
cpu_family = 'aarch64'
cpu = 'aarch64'
endian = 'little'
(build command)../meson/meson.py setup --wipe build -Denable_libav=true -Denable_drm=true -Denable_egl=true -Denable_qt=true -Denable_opencv=false -Denable_tflite=false --cross-file rpi_cross_file.txt
../meson/meson.py compile -C build
../meson/meson.py configure build --prefix=$(pwd)/installed_bin
../meson/meson.py install -C build
- Move the
installed_binto RPI4 and test, and it worked. I can see the captured image fromlibcamera-stillI built
(In RPI4)cd installed_bin/bin
LD_LIBRARY_PATH=../lib/ ./libcamera-still -n -o test.jpeg
pi@raspberrypi:~/installed_bin/bin $ LD_LIBRARY_PATH=../lib/ ./libcamera-still -n -o test.jpeg
[7:34:57.848380731] [3001] INFO Camera camera_manager.cpp:297 libcamera v0.0.5+83-bde9b04f
[7:34:57.901412896] [3002] WARN RPI vc4.cpp:383 Mismatch between Unicam and CamHelper for embedded data usage!
[7:34:57.902202812] [3002] INFO RPI vc4.cpp:437 Registered camera /base/soc/i2c0mux/i2c@1/imx219@10 to Unicam device /dev/media4 and ISP device /dev/media0
[7:34:57.902256701] [3002] INFO RPI pipeline_base.cpp:1101 Using configuration file '/usr/share/libcamera/pipeline/rpi/vc4/rpi_apps.yaml'
[7:34:57.903167208] [3001] INFO Camera camera.cpp:1033 configuring streams: (0) 1640x1232-YUV420
[7:34:57.903809126] [3002] INFO RPI vc4.cpp:565 Sensor: /base/soc/i2c0mux/i2c@1/imx219@10 - Selected sensor format: 1640x1232-SBGGR10_1X10 - Selected unicam format: 1640x1232-pBAA
[7:35:03.027655665] [3001] INFO Camera camera.cpp:1033 configuring streams: (0) 3280x2464-YUV420 (1) 3280x2464-SBGGR10_CSI2P
[7:35:03.034392006] [3002] INFO RPI vc4.cpp:565 Sensor: /base/soc/i2c0mux/i2c@1/imx219@10 - Selected sensor format: 3280x2464-SBGGR10_1X10 - Selected unicam format: 3280x2464-pBAA
Still capture image received


- But it failed when I wanted to capture video, so the next step is to debug using
gdbfrom the toolchain.
pi@raspberrypi:~/installed_bin/bin $ LD_LIBRARY_PATH=../lib/ ./libcamera-vid -n -o test.h264
ERROR: *** Invalid time string provided ***
Conclusion
The goal is almost accomplished; I can build my own apps now. However, libcamera-vid does not work properly, so the next step is to develop and debug in this compilation environment.
Comments
Post a Comment